AI 개념과 에이전트
AI 개념
ai
- 사람처럼 생각한다. - thinking humanly
- 계산적인 모델을 통해 지능을 연구 - thinking rationally
- 사람이 더 나아지는 방향으로 컴퓨터를 만드는 연구 - acting humanly
- 지능적으로 행동한다 - acting rationally
튜링 테스트
- 기계가 생각 가능한가? → 기계가 지적으로 행동할 수 있는가?
- 반복 불가. 수학적인 분석으로 수정하거나 생성할 수 없다.
사람처럼 생각하기(thinking humanly) - cognitive science(인지과학)
- 행동 관점과 상반된 주장에서 나왔다. 심리학에 가깝다.
- 뇌의 내부 행동의 과학적 이론이 필요하다.
- 추상화의 단계는? Knowledge or Circuits
- How to validate?
- 사람의 행동을 예측하거나 테스트한다. (탑다운)
- 뇌과학적인 지능으로 부터 직접 명령한다.(바텀업)
- 예를 들어 사람의 정신에 대한 충분한 정보와 이론을 얻어 프로그램을 짰다고 가정할때, 프로그램의 입출력이 인간의 행동과 부합하면 일부 메커니즘이 인간적으로 작동한다고 볼 수 있다.
이성적으로 생각하기(thinking rationally) - Laws of Thought
- descriptive(서술적) 보단 사전에 정한 규칙대로 진행한다. - 아리스토텔레스의 삼단논법
- 생각의 틀을 잡고 선을 정하는게 현대 AI 발전의 길이다.
- 문제점
- 모든 informal 지식을 formal 용어로 표현하기 어렵다.
- 모든 지능적 행동이 logical deliberation에 따르지 않는다. → 추론 단계에 따라 문제가 풀리지 않을 수 있다.
사람처럼 행동하기
- 사람이 행동하는 것을 따라한다.
- 사람이 더 잘하는 것을 컴퓨터가 할 수 있게 만든다.
사람처럼 행동하기(인간적 행위) - 튜링 검사 접근방식
- 튜링검사 - 사람처럼 대답한다.
- 자연어 처리 - 사람과 의사소통이 되게 한다.
- 지식 표현 - 알고 & 들은 정보를 저장한다.
- 자동 추론 - 정보를 이용해 질문에 답하고 새로운 결론을 도출한다.
- 기계 학습 - 기존의 정보를 새로운 상황에 사용할 수 있게 한다.
- 완전 튜링 검사 - 물리적 시뮬레이션이 포함된 튜링 검사(비디오 신호가 포함된다). 두 조건이 충족해야 한다.
- 컴퓨터 비젼
- 로봇공학
이성적으로 행동하기
- 올바른 것을 한다.
- The right Thing - goal achievement을 최적화하는 방향
- 생각을 꼭 수반하지 않는다. (eg. 눈 깜박이기) 하지만, 있으면 좋다.
이성적으로 행동하기 - 이성적인 에이전트 접근방식
- 입력과 출력이 있는 하나의 객체다.
- 자율적으로 작동하고 환경을 인지하고, 장기간 행동을 유지하고, 변화에 적응하고, 목표를 만들고 추구한다.
- rational agents를 디자인하는 것이 ai 플래닝의 목표
- 핵심: 받아들인 축적된 histories를 행동으로 변환하는 함수(기능)
- 주어진 다양한 환경과 task로 부터 최고의 성능을 추구한다.
- 튜링 검사 통과에 필요한 능력이 이성적인 에이전트를 만드는데 도움이 된다.
에이전트
PAGE
- Percepts: 재료와 같은 입력. 받아들인 지각
- 에이전트는 지각하지 못한 것에는 전혀 의존하지 않는다.
- Actions: 재료로 만든 행동
- Goals: 행동으로 진행할 목표
- Environment: 주변 환경
Rational agents(전지전능한x, 천리를 보는x, 성공을 추구하는x)
- 이성적인 에이전트는 omniscient를 추구하지 않는다. omniscient는 완벽함을 추구한다. 하지만 에이전트는 percept sequence에 의존해 최적의 행동을 도출한다.
- 합리성. 합리성은 네가지 요소가 필요하다.
- 성과 측정 - 성공의 기준을 정의한다.
- 환경에 대한 에이전트의 사전 지식
- 에이전트가 수행할 수 있는 동작들
- 에이전트의 지금까지의 지각열(given the percept sequence to date)
- 즉, 합리적 에이전트는 percept sequence와 사전 지식으로 성과 측정치를 극대화하는 동작을 선택한다. (주어진 percept sequence로 성과 측정의 기댓값을 최대화해야한다.)
문제 해결 설정
Environment types
- inaccessible
- stochastic - deterministic or stochastic
- sequential - episodic or sequential
- dynamic - static or dynamic. 환경 자체는 변하지 않지만 에이전트의 결정에 따라 성과 측정치가 변하는 경우: semidynamic
- continuous - discrete or continuous
- unknown - known or unknown. 에이전트의 지식 상태에 관한 구분. environment type은 아님.
- known이 fully observable만은 아니다. partial observable도 존재한다. - solitaire에서 모든 규칙을 알지만 뒤집지 않은 카드의 정보는 알 수 없다.
- unknown이 partial observable만은 아니다. fully observable도 존재한다. - 비디오 게임 첫 화면에서 모든 버튼의 동작을 알지 못하지만 게임 화면의 모든 정보는 알 수 있다.
Problem types
참고.
- 관찰 가능하다 → fully observable
- 부분 관찰이 가능하다 → partial observable
- fully observable X, deterministic X(stochastic) → Uncertain
- 결정가능한, 접근가능한(single-state problem)
- 결정가능한, 접근불가능한-정보를 다 모르는(mulitiple-state problem)
- 결정불가능한, 접근불가능한(contingency problem-대책이 필요한 문제)
- 실행동안 센서를 사용해야한다.
- tree 방식이나 policy 방식을 사용한다.
- Unknown(infinite) state space(exploration problem-온라인 문제. 얼마나 많은 데이터, state가 나올지 모르는.)
Agent functions and programs
- 에이전트는
- percept 후 메모리에 업데이트
- 메모리에서 최고의 액션을 선택
- 메모리 최적화

여러가지 에이전트
Agent types
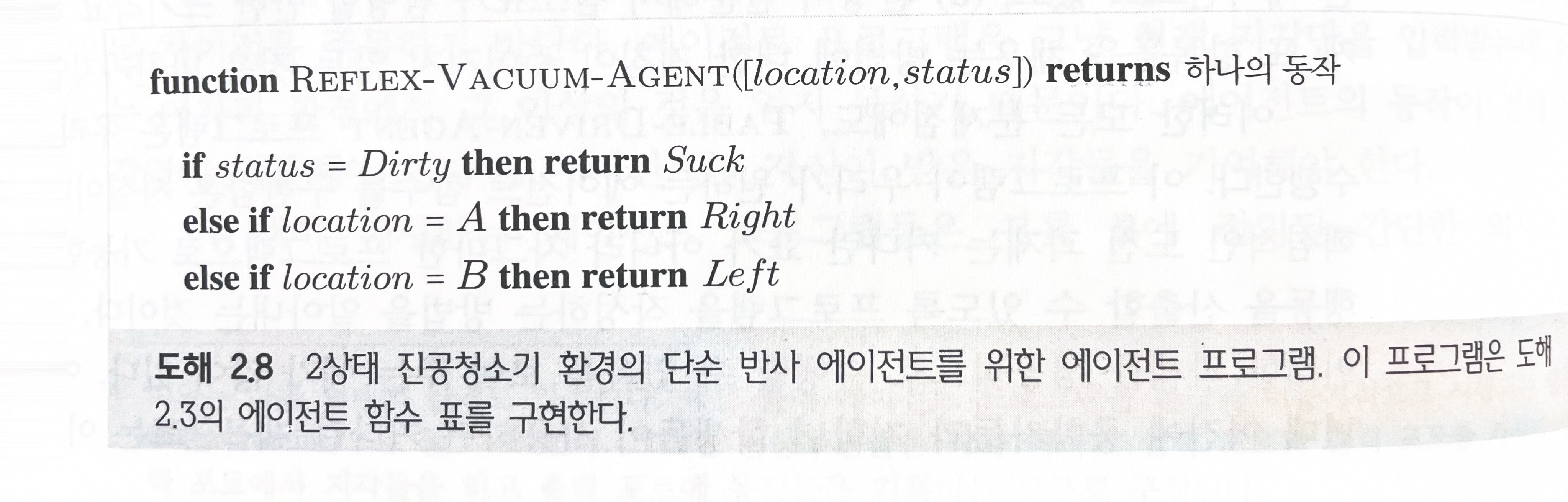
- simple reflex agents
- reflex agents with state
- goal-based agents(목표 달성을 지향한다)
- utility-based agents(목표 달성에 지름길을 활용한다) - optimal(최적화. 얼마나 searching을 잘하는가)


- sequence는 고려하지 않고 현재 percept만 고려한다.
- 즉, 완전 관찰 가능(fully observable)에서만 작동한다.
- 따라서 무한 루프에 빠질 가능성이 있다. eg. 위치감지기가 없는 진공청소기(partial observable). left 상태에서 left로 이동하려고 하는 경우(갈 수 있는 칸이 ㅁㅁ 이렇게 되어 있다고 가정할 때).
- 무작위화(randomization) 개념을 넣으면 해결 가능하다.
- 다중 에이전트에서 무작위화는 도움이 될 때가 있다.
- 단, 단일 에이전트에서 무작위화는 대체로 합리적 이지 않다.
- 무작위화(randomization) 개념을 넣으면 해결 가능하다.
- 조건-동작 규칙(condition-action rule)이다.
- 우리의 간단한 생리적 행동을 생각하자. eg. 뜨거운 물체를 잡았을때, 바로 손을 뗀다. 앞차가 제동을 걸면 나도 제동을 건다.
- percept를 바탕으로 현재 state를 추측
- state(eg. finite state machine)에 맞는 rule을 매칭
- rule에 해당하는 action 리턴
- 진공청소기 환경 단순 반사 에이전트 - left, right, suck, do nothing
Reflex agents with state(model-based agent)


- partial observable 가능성을 해결한다.
- percept를 받아 현재 state 추측
- model은 action에 영향을 받은 state가 어떻게 될지 추측
- 추측한 state 반영
- state에 해당하는 rule 매칭
- rule에 해당하는 action 리턴
Goal-based agents
- 에이전트의 내부 상태뿐만 아니라 목표를 설정한다.
- 목표를 달성하기 위한 action sequence를 찾아야한다.
- search, planning이 이를 가능하게 한다.

Utility-based agents
- 목표 + 효용. 더 나은 방향으로 목표를 수행하게 한다.
- utility function이 내장되어 있다.
- utility function과 외부 성과 측정 사이에 모순이 없다면 효용을 최대화하는 방향으로 동작한다.
- expected utility를 최대화하는 방향으로 동작한다.

문제 해결과 검색
문제 해결과 검색(Problem solving and search)
- problem-solving 에이전트는 목표 기반 에이전트의 하나이다.
- 세계의 상태를 episodic으로 간주한다.
- uninformed 검색 알고리즘은 어떠한 문제라도 풀 수 있으나 효율적으로 풀지는 못한다.
- informed 알고리즘은 효율적으로 문제를 풀 수 있다.
문제 해결 에이전트
Problem-solving agent
- 문제 해결 에이전트는 목표를 정하고 성과 측정치를 최대화한다.
- 목표와 성과 측정치에 집중하기 때문에 의사결정 문제가 간단해진다.
- 따라서 고려해야할 동작들이 제한된다. eg. 환불 불가 비행기 티켓으로 떠날때, 여행지에 도착하는 것이 목표이기 때문에 제때 도착하지 못하는 것은 배제한다.
- 이러한 goal formulation(목표 형식화)와 problem formulation(문제 형식화)가 중요하다.
- action sequence를 찾는 공정 - search. action sequence - solution. execution
- formulation → search → execution의 단계로 설계한다.
전형적인 problem-solving agent


- percept를 받아 현재 state 추측
- action sequence가 없다면
- state로 goal formulate를 한다.
- state와 형식화된goal로 problem formulate를 한다.
- 형식화된 문제에 대한 action sequence를 찾는다(search).
- action sequence가 failure이면 동작하지 않는다.
- action sequence에서 첫번째 action을 수행하고 그 action을 action sequence에서 제거한다.
- 루프를 반복한다.
- solution: 5 → 6 → 8
- 시작점이 1~8 모두 가능.
- solution: 1→5→6→8. 2→4→3→7
- 5번에서 현재 위치에 먼지가 없어 할일이 없음. suck이 되려 더러워지게 할 수 있기 때문에
- 센서를 활용하면(partially observable이기 때문에), 5 → 6 → 8

싱글 state 문제
- 상태 공간(state space)
- initial state
- operators(sequence of actions)
- 전이모형(transition model). eg. RESULT(In(Arad), Go(Zerind) = In(Zerind)
- goal test
- path cost(경로에 따른 비용)
- initial state → goal state 로 갈때까지 과정이 반복된다.
- 그중 최적해(optimal solution)을 찾는다. 이는 sequence of operators이다.
state space 설정
- 문제 해결을 위해 state space를 추상화한다.
- (Abstract)state - 실제 상태 중 일부
- (Abstract)operator - 실제 actions의 복합적인 작용
- (Abstract)solution - 실제 세계에서 솔루션을 향한 실제 경로의 일부
- Abstract도 실제와 같다고 볼 수 있다. 보다 easier을 위해 추상화한것
검색 알고리즘
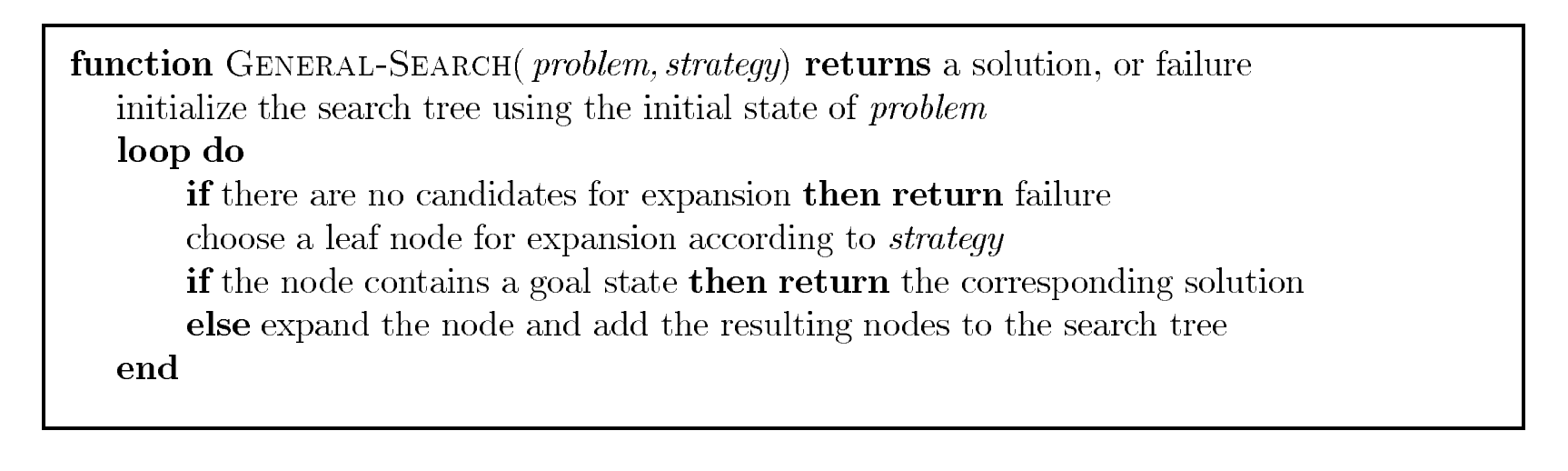
일반적인 검색 알고리즘
Search algorithm(Search Tree)
- 구조
- n: 현재 노드
- n.state: 노드에 해당하는 상태
- n.parent: 부모 노드
- n.action: 부모 노드에서 현재 노드가 되기 위해 행한 것
- n.path-cost: 루트 노드에서 현재 노드까지의 비용(경로)
- node와 state는 다르다. 서로 다른 두 노드가 같은 상태를 가질 수 있다. 따라서 이러한 노드들을 저장해줄 queue(대기열)이 필요하다.
- 결과는 하나의 동작열(action sequence)이다.
- 초기 상태에서 시작하는 가능한 action sequence는 하나의 검색 트리(search tree)를 형성한다.
- tree의 구성 요소
- root: initial state. branch: action. node: state
- tree 성장 과정
- initial state가 goal state인지 확인한다.
- state에 action을 한 다음 state를 생성 및 확장한다. 여기서 state는 frontier node이다.
- Tree search 알고리즘
- Graph search 알고리즘
- 탐색집합을 추가해 과잉 탐색을 막는다.
- tree의 구성 요소


State vs Node
- state는 물리적인 구성의 하나이다.(real한 것)
- node는 search tree의 구조적 구성의 하나이다.(state를 컴퓨팅적으로 표현한 것)
- 즉, parent, children, depth와 같은 tree 구성의 특징은 node만 있다.
- 우리는 state를 표현하기 위해 node를 활용한다. 점차 node를 확장시켜 실세계와 가까운 것을 만든다.
문제 해결 성능 측정
- Strategy 평가 요소
- 완결성(completeness): 문제에 해답이 존재할 때, 알고리즘이 반드시 해답을 찾아내는가
- 최적성(optimality): 검색 전략이 최적해를 찾아내는가
- 시간 복잡도(time complexity): 해답을 찾는데 얼마나 시간이 걸리는가
- 공간 복잡도(space complexity): 검색을 수행하는데 메모리가 얼마나 필요한가
- 분기 계수(branching factor): 임의의 노드의 후행자 최대 개수
- 깊이(depth): 목표 노드의 깊이
- 길이(maximum length): 상태 공간 임의의 경로의 최대 길이

Uninformed Search Strategies
Uniformed search strategies
- 상태에 관해 문제 정의 이상의 정보를 제공받지 못하는 상황
- 따라서 할 수 있는 일은 후행자들을 생성하고 목표 상태와 비목표 상태를 구분해야 하는 것이다.
- 어떤 비목표 상태가 더 유망한지 판단하는 전략은 informed search에서 다룬다.
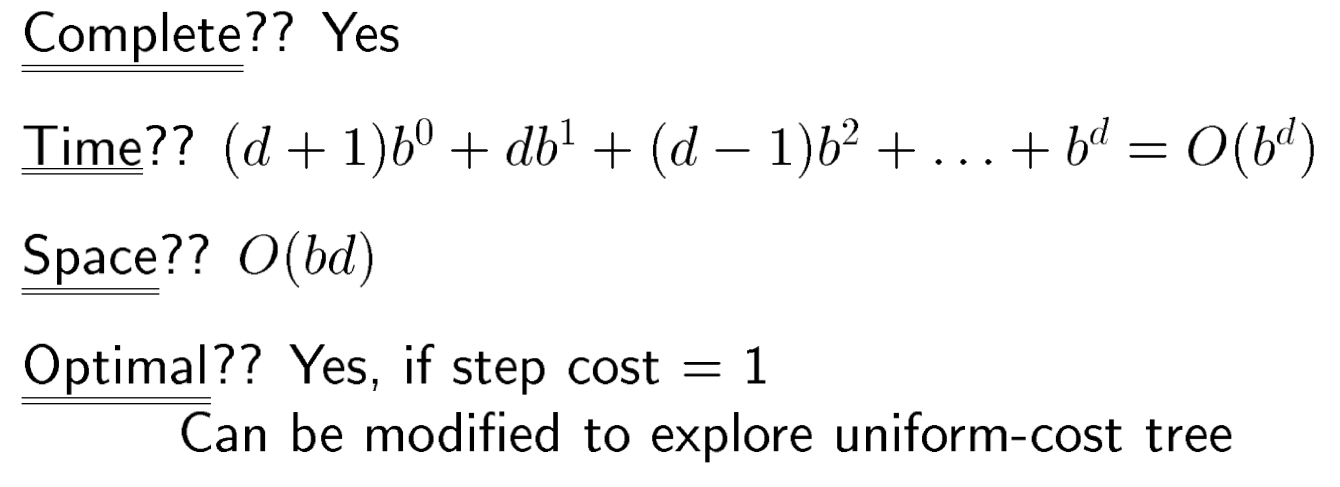
- Breadth-first search(너비 우선 탐색)
- Queue를 활용한다. frontier은 전선이다.
- 깊이가 얕은 노드부터 탐색한다.
- 목표 판정을 확정할 노드를 생성할 때 수행한다.
- 성능 측정
- 완결성: 완결적이다. (목표 노드가 유한한 깊이에 있을 때)
- 시간 복잡도: O(b^d), (b: 후행자 노드 개수, d: 목표 노드까지의 깊이. 노드를 선택할 때 목표 판정을 하면 d+1이 된다.)
- 공간 복잡도: O(b^d), (탐색한 노드 집합은 O(b^(d-1)), 전선 노드 집합은 O(b^d))
- 최적성: 항상 최적해는 아니다. 경로 비용이 노드 깊이에 비감소 함수 일 때, 최적이다.
- 비감소 함수가 아니라면 BFS는 최적해가 아닌 가장 비싼 경로를 반환할 수도 있다.
- BFS는 시간복잡도보다 공간복잡도(메모리 요구량)이 큰 문제이다.
- 하지만 시간 역시 큰 문제이다.(둘다 기하급수적으로 늘어나기 때문.)
- 1초에 100만 노드 생성 가능. 1 노드 당 1000바이트라고 가정.
- 1초에 1기가 바이트 필요. 깊이가 10인 문제는 3시간이 걸리며, 10 TB가 필요하다.


- Uniform-cost search(균일 비용 검색)
- BFS에서 경로 비용을 고려한 알고리즘(단계 비용 함수에 최적해를 찾기 위한 알고리즘)
- 경로 비용 g(n)에 대해 정렬한 뒤, g가 가장 낮은 노드 n을 확장한다.
- g(n) = 경로까지의 모든 비용의 합
- BFS와의 차이점
- 경로 비용 g(n)에 따라 정렬한다.
- 목표 판정은 확장을 위해 선택될 때 수행한다.
- 경로 비용이 더 나은 노드가 있는지 판단한다.
- 루마니아 상태 공간 예시
- 시비우 → 부카레스트
- 비용이 더 싼 림니쿠 빌차(80) 노드를 확장한다.
- 80 + 97 = 177인 피테스티 노드가 추가된다.
- 피테스티(177)보다 비용이 더 싼 파가라스(99) 노드를 확장한다.
- 99 + 211 = 310인 부카레스트 노드가 추가된다.
- 목표 노드인 부카레스트가 생성됐지만, 최적해를 판단하기 위해 피테스티 노드를 확장한다.만약, BFS처럼 INSERT 전에 목표 노드인지 판단한다면 더 나은 비용의 최적해를 찾을 수 없다.
- 80 + 97 + 101 = 278인 부카레스트의 또 다른 경로를 추가한다.
- 성능 측정
- 완결성: 완결적이다. (경로 비용이 작은 양의 상수 ε보다 클때)
- 시간 복잡도, 공간 복잡도: 노드 수(b)나 깊이(d)가 아닌 비용으로 판단해야 한다.작은 단계들을 모두 지난 뒤, 큰 단계를 지나는 경우이다.
- 모든 경로 비용이 동일할 때, O(b^(d+1))이다. 즉, 이 경우, BFS보다 나쁘다.
- 최적해의 비용이 C*이고, 모든 동작의 비용이 적어도 ε일 때, 최악의 경우 O(b(1+C/ε))이다.
- 최적성: 항상 최적해이다.


- Depth-first search
- Queue가 아닌 Stack을 사용한다.
- 성능측정
- 완결성:
- 그래프 검색: 완결적이다. 그래프 검색은 반복과 과잉 경로를 피하기 때문이다.
- 트리 검색: 완결성을 보장할 수 없다. 무한 루프에 빠질 수 있기 때문이다.
- 내가 지나온 길을 반복해서 도는 경우, 깊이가 무한대인 경우
- 시간 복잡도: O(b^m)
- 그래프 검색: 상태 공간 크기에 따라 상계와 하계가 존재한다.
- 트리 검색: 최악의 경우, 검색 트리의 모든 노드를 생성할 수 있다.
- 공간 복잡도: O(bm), (b: 후행자 노드 개수, m: 노드의 최대 깊이). —> DFS의 장점
- 한 노드를 확장 하고 그 모든 후손을 완전히 탐색했다면 해당 노드를 메모리에서 제거한다.
- 최적성: 최적의 해가 아니다.
- 목표 노드가 A, B이고 A가 왼쪽 부분 트리, B가 오른쪽 부분 트리이며 최적해라고 가정하자.
- DFS는 A를 해답으로 반환한다.
- 완결성:
- 일련의 문제를 백트래킹을 활용해 해결이 가능하다.

- Depth-limited search
- DFS의 문제점을 깊이 제한을 두어 해결한 알고리즘
- 깊이 제한(l)을 두어 무한 경로 문제를 해결한다.(무한 루프에 빠지는 경우)
- l < d 일 때, 문제는 완결되지 않는다.(깊이 제한 보다 목표 노드의 깊이가 더 깊을 때)
- 성능 측정
- 완결성: 완결적이지 않다.(l < d 일 때)
- 시간 복잡도: O(b^l)
- 공간 복잡도: O(bl)
- 최적성: 최적의 해가 아니다.(l < d 일 때)
- 가능한 l의 범위를 잘 설정하면 최적의 상황 조성이 가능하다. 이는 지름(diameter)을 잘 설정하는데 달려있다.
- 문제에 대한 지식을 가지고 있을 때 가능하다.
- 두가지의 실패 경우가 존재한다.
- failure: 해답이 없다.
- cutoff: 주어진 깊이 한계 내에서 해답이 없다.

- Iterative deepening search
- 최상의 깊이 한계를 찾는 알고리즘이다.
- DFS 트리와 함께 사용한다.
- 깊이 한계를 점차 증가시켜 가장 얕은 목표 노드 d를 발견하는 게 목표다.
- DFS + BFS 장점을 합친 버전이다.
- 분기 계수가 유한할 때 완결적이다.
- 경로 비용이 노드 깊이의 비감소 함수일 때 최적이다.
- 성능 측정
- 완결성: 완결적이다. (분기 계수가 유한할 때 → BFS와 같음)
- 공간 복잡도: O(bd). (→ DFS와 같음)
- 시간 복잡도: O(b^d)
- 최하위(d) 노드는 한번 생성되고, 그 위 노드들은 반복해서 생성된다.
- 최적성: 최적의 해이다. (경로 비용이 노드 깊이의 비감소 함수일 때 → BFS와 같음)
- 일반적으로 검색 공간이 크고 해답의 깊이가 알려지지 않을 때 사용한다.


- Bidirectional Search(양방향 검색)
- 초기 상태에서 시작하는 전방 검색과 목표에서 시작하는 후방 검색을 동시에 수행한다.
- b^(d/2) + b^(d/2) < b^d 의 이점을 가진다.
- 두 검색의 전선이 교차해야 해답이 존재한다.
- 성능 측정
- 시간 복잡도: O(b^(d/2)). (2*b^(d/2)는 O(b^(d/2)이다)
- 공간 복잡도: O(b^(d/2)). (2*b^(d/2)는 O(b^(d/2)이다)
- 둘 중 하나에 반복 심화를 적용한다면 대략 절반으로 줄일 수 있다. → b^(d/2) + b(d/2)가 된다.
- 단, 교차 판정을 위해 두 전선 중 적어도 하나는 메모리에 유지해야 한다.
- 공간 요구량이 가장 큰 약점이다.
- 후방 검색을 위해 역방향으로 검색하는 방법을 알아야하는 문제점이 있다.
- 선행자(predecessor)를 찾는 것은 어렵다.
Informed Search
- Best-First Search
- 트리 검색이나 그래프 검색 알고리즘
- 균일 비용 검색과 알고리즘이 같되 g(n)이 아닌 f(n)으로 경로를 판단한다.
- 확장할 노드를 평가 함수(evaluation function - f(n))에 기초해 선택한다. f(n)이 가장 낮은 노드가 먼저 확장된다.
- f(x)의 선택은 검색 전략을 결정한다. 대부분의 f에는 heuristic이 포함된다.
- 각 노드마다 heuristic(desirability) - h(n)을 계산한다.
- h(n) = 노드 n에서 목표 상태로의 가장 싼 경로 추정 비용(직선 거리)
- h(n) > 0, 목표 노드의 h(n) = 0
- greedy search와 A*알고리즘이 특이 케이스

- Greedy-First Search
- f(n) = h(n)
- 각 노드마다 heuristic을 계산한다.
- heuristic은 현재 노드와 goal 노드간 직선 거리
- heuristic이 가장 작은 값을 따라간다.
- 성능 측정:
- 완결성: 완결적이지 않다.
- 이아시 → 파가라스일 때, 그리디 알고리즘은 네암트를 확장한다. 그럼 막다른 길에 도착해 목표 노드까지 갈 수 없다. 무한 루프에 빠진다.
- 그래프 검색에서는 유한한 공간에서 완결적이다.
- 시간 복잡도: O(b^m)
- 공간 복잡도: O(b^m)
- 최적성: 최적의 해가 아니다. 매 단계마다 가장 싼 값을 고르기 때문에 전체적으로 최적인 해를 구하지는 않는다.
- 완결성: 완결적이지 않다.



- A* 알고리즘
- 이미 방문한 경로는 피한다.
- 가능성이 없는 노드는 확장하지 않는다. → prunning(가지치기)
- Optimally efficient하다. A*보다 더 적은 노드를 확장하는 최적의 알고리즘은 없다.
- f(n) = g(n) + h(n)(그리디 + 휴리스틱(desirability) 알고리즘. h는 partial observable 요소이다.)
- f(n) = n을 거쳐 가는 가장 싼 해답의 추정 비용
- g(n) = 경로까지 모든 비용의 합
- 알고리즘은 균일 비용 검색 알고리즘과 같되 g(n) 대신 g(n) + h(n)으로 한다.
- 성능 측정
- 완결성: 완결적이다.
- 단, 비용이 C*(최적해 경로 비용) 이하인 노드가 유한해야한다.
- 최적성: 최적의 해이다.
- 시간 복잡도 —- 질문: 각각의 경우에 따라 복잡도가 왜 다른지
- 절대오차 Δ ≡ h* -h. 상대오차 ε ≡ (h* - h) / h*
- 목표가 하나이며, 동작이 가역적인 경우: O(b^Δ)
- 단계 비용들이 일정한 경우: O(b^(εd)) = O((b^ε)^d). (d는 해답의 깊이)
- 즉, 유효 분기 계수는 b^ε이다.
- d에 지수적이다.
- 공간 복잡도: 모든 노드를 메모리에 저장해야한다.(모든 그래프 검색 알고리즘이 그러하다.)
- 최적성 요건 - 트리 검색
- 허용 가능 발견법적 함수(admissible heuristic) → h(n)을 과도하게 설정하지 않는다.
- f(n) = g(n) + h(n)은 항상 최소 경로를 찾아야한다(최적해를 구하기 위해). 여기서 g(n)은 노드간 실제 거리이므로 상수이다.
- h(n)에 대해 h(n) ≤ h*(n)이어야 한다. (h*(n)은 실제 거리 = 실제 최소 비용)
- 위를 만족해야 f(n)이 항상 최소 경로를 찾는다고 보장할 수 있다.
- 가장 명백한 예는 직선거리이다. 직선거리는 절대 실제 거리보다 과대추정될 수 없다.
- 일관성(consistency), 단조성(monotonicity) - 그래프 검색 —- 질문: 내가 이해한 게 맞는지
- h(n) ≤ c(n, a, n’) + h(n’), (n’: n에 a(action)을 행한 후행자, c: cost, c는 step 비용으로 볼 수 있다. 즉, 두 노드간 거리)
- → c(n, a, n’)은 step 비용으로 상수값(c)이다. h(n)은 항상 실제 거리보다 작은 하계의 값으로 유동값이다. h(n) ≥ h(n’) + c라면, h(n)은 실제 거리 h*(n)을 넘어선 값이 된다.
- 허용 가능 발견법적 함수(admissible heuristic) → h(n)을 과도하게 설정하지 않는다.
- 완결성: 완결적이다.
- 최적성 증명하기
- h(n)이 일관적이면, 임의의 경로에 있는 f(n)의 값들은 비감소이다. —- 질문: uninformed에서 비감소여야하는 이유와 동일한가. 비감소여야 최적의 해를 구한다. 그 이유는 검색을 이어나가는 의미가 있기 때문
- f(n’) = g(n’) + h(n’) = g(n) + c(n, a, n’) + h(n’) ≥ g(n) + h(n) = f(n). f(n’) ≥ f(n)
- 나의 생각: 검색이 진행됨에 따라 최적의 경로에서 g는 증가하고 h는 감소한다.
- A*가 확장을 위해 노드 n을 선택할 때, 그 노드로의 최적 경로가 이미 발견돼 있다.
- 시작 노드를 중심으로 점차 비용이 증가하는 띠들의 형태로 노드를 추가한다. 옆 그림 참고
- A는 f(n) < C인 모든 노드를 확장한다.
- A는 목표 노드를 선택하기 전에 목표 등고선(f(n) = C인 등고선)에 걸쳐있는 일부 노드들을 확장할 수 있다.
- h(n)이 일관적이면, 임의의 경로에 있는 f(n)의 값들은 비감소이다. —- 질문: uninformed에서 비감소여야하는 이유와 동일한가. 비감소여야 최적의 해를 구한다. 그 이유는 검색을 이어나가는 의미가 있기 때문




- 문제점
- 검색 공간 안의 상태의 수가 해답 길이 d에 지수적이다.
- 최적해 깊이 d의 실행 시간 증가 정도를 절대오차 Δ와 상대오차 ε를 통해 분석한다.
- 거의 모든 heuristic 함수들은 절대오차 Δ가 h*에 비례하므로 상대오차 ε은 상수이거나 증가한다.
- 상태의 수가 d에 지수적인 만큼 시간 복잡도도 d에 지수적이다.
- 목표 상태가 여러 개일 때, near-optimal이 여러 개일 때
- 검색 공정이 최적 경로에서 멀어질 수 있다.
- 목표 개수에 비례하는 추가 비용이 들 수 있다. 최적 비용의 1/ε 이내
- 일반적인 그래프의 경우
- f(n) < C*인 상태의 수가 지수적일 수 있다.
- eg. 에이전트가 사각형을 청소한다. 더러운 사각형이 N개이다. 이때 f(n) < C*를 만족하는 상태들은 2^N개다.
- 검색 공간 안의 상태의 수가 해답 길이 d에 지수적이다.
- A* 알고리즘 변형
- IDA*
- A* 알고리즘의 메모리 요구량을 줄여준다.
- 깊이 대신 g + h(비용)을 cutoff로 사용한다.
- cutoff 설정은 이전 반복의 cutoff보다 크지 않은 가장 작은 값 f로 한다.
- 단계 비용이 일정한 문제에 유용하다.
- RBFS —- 추가
- MA* —- 추가
- SMA* —- 추가
- 문제점
- 검색 공간 안의 상태의 수가 해답 길이 d에 지수적이다.
- 최적해 깊이 d의 실행 시간 증가 정도를 절대오차 Δ와 상대오차 ε를 통해 분석한다.
- 거의 모든 heuristic 함수들은 절대오차 Δ가 h*에 비례하므로 상대오차 ε은 상수이거나 증가한다.
- 상태의 수가 d에 지수적인 만큼 시간 복잡도도 d에 지수적이다.
- 목표 상태가 여러 개일 때, near-optimal이 여러 개일 때
- 검색 공정이 최적 경로에서 멀어질 수 있다.
- 목표 개수에 비례하는 추가 비용이 들 수 있다. 최적 비용의 1/ε 이내
- 일반적인 그래프의 경우
- f(n) < C*인 상태의 수가 지수적일 수 있다.
- eg. 에이전트가 사각형을 청소한다. 더러운 사각형이 N개이다. 이때 f(n) < C*를 만족하는 상태들은 2^N개다.

- 검색 공간 안의 상태의 수가 해답 길이 d에 지수적이다.
- IDA*
- A* 알고리즘 변형
- IDA*
- A* 알고리즘의 메모리 요구량을 줄여준다.
- 깊이 대신 g + h(비용)을 cutoff로 사용한다.
- cutoff 설정은 이전 반복의 cutoff보다 크지 않은 가장 작은 값 f로 한다.
- 단계 비용이 일정한 문제에 유용하다.
- RBFS —- 추가
- MA* —- 추가
- SMA* —- 추가
- IDA*
- heuristic 함수
- Admissible Heuristic
- eg. 8-퍼즐 문제
- 평균 해답 비용 h* = 26
- h1 = 잘못 놓여진 타일의 개수. (예시에서는 7개)
- h2 = 맨해튼 거리 총합. (예시에서는 2 + 3 + 3 + 2 + 4 + 2 + 0 + 2 = 18칸)
- h1, h2 모두 h*를 초과하지 않는다. admissible
- eg. 8-퍼즐 문제
- 성능 요소
- 유효 분기 계수(effective branching factor) b*가 중요하다.
- A가 생성하는 전체 노드 개수가 N, 전체 해답 길이가 d일 때, N + 1 = 1 + b + (b*)^2 + … + (b*)^d 이다.
- 잘 설계된 heuristic 함수는 b*가 1에 가깝다.
- domination
- h1(n) ≤ h2(n)은 자명하다. → 우세하다.
- 증명
- f(n) < C이므로 h(n) < C - g(n)인 모든 노드는 확장된다.
- 모든 노드에 대해 h2가 h1보다 작지 않다.
- 따라서 h2를 활용하는 A가 확장하는 노드는 h1을 활용하는 A에서도 확장된다.(h1이 더 많은 노드를 확장한다.)
- Admissible Heuristic
- Relaxed Problem
- 문제에 대해 제약을 완화한다. 이를 통해 더 나은 해답을 찾는다.
- 검색없이 문제를 해결할 수 있다.
- 8-퍼즐 문제에서 타일이 any where 갈 수 있다면, h1이 최단 해답을 제공한다.
- 8-퍼즐 문제에서 타일이 any adjacent square로 갈 수 있다면, h2가 최단 해답을 제공한다.

심화 검색 알고리즘
Local Search
Local Search
- 경로 비용은 중요하지 않고 해답 상태만 중요하다.
- current node만 사용한다. 경로는 저장하지 않는다.
- 장점
- 메모리를 적게 소비한다.
- infinite 상태 공간에서도 해답을 찾는다.
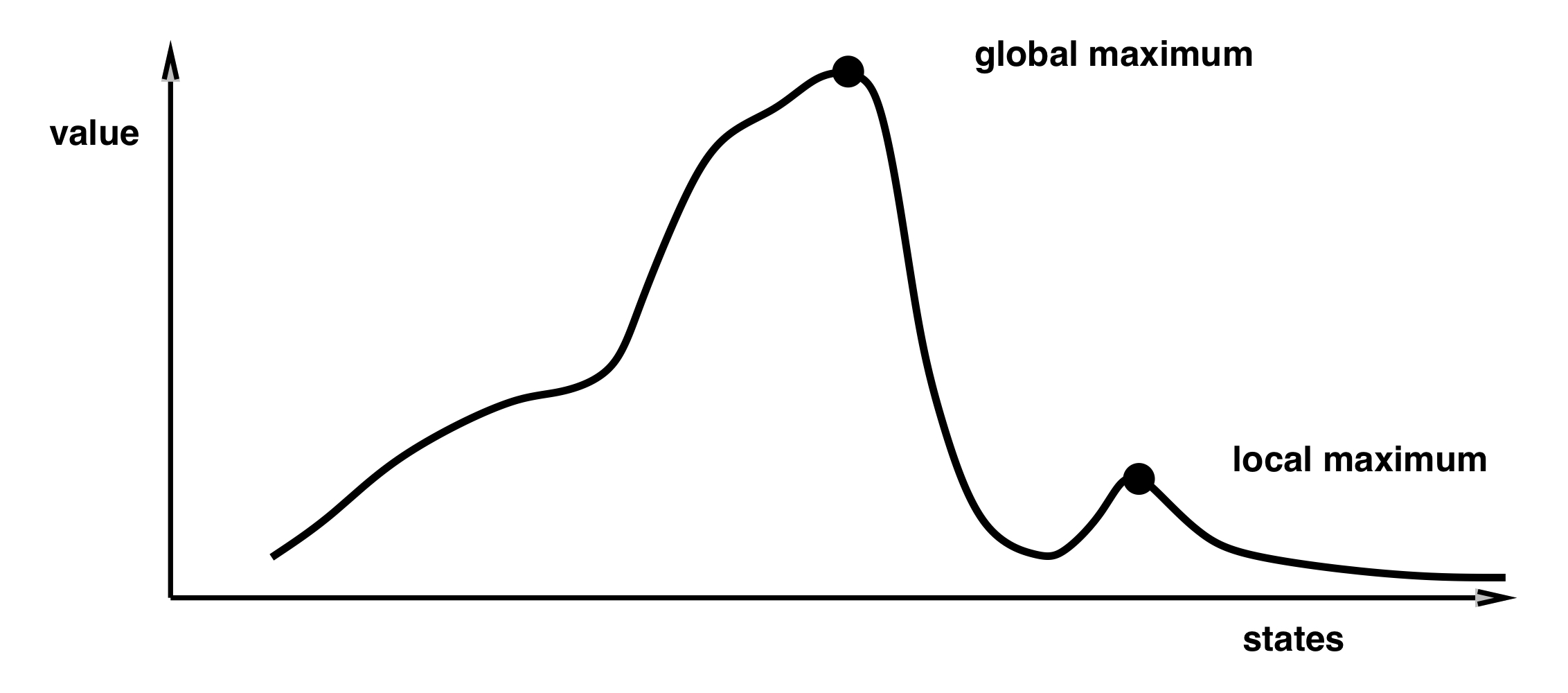
- Hill-Climbing Search
- 값이 증가하는 방향으로 이동한다.
- adjacent node에 증가하는 값이 없으면 탐색을 종료한다.
- local maximun에 도달하면 더이상 이동하지 않는다. 즉, global maximum에 도달할 수 없다.
- 또한 값이 동일한 상태인 shoulder에 위치하면 길을 잃는다.
- Simulated Annealing
- Hill-Climbing Search는 local maximum에 머무를 수 있으므로 완결적이지 않다.
- 탐색에서 다음과 같은 과정을 거쳐 이를 해결한다.
- successor를 선정할 때, 난수로 선택한다.
- ΔE(변화량)이 0보다 크면 난수로 이동한다.
- 아니면 확률적으로 난수를 선택한다. (코드에서 확률은 온도 T에 비례한다.)


- Genetic Algorithm
- local search에서 특이하게 initial nodes 여러 개를 선택한다.
- Fitness Function에 따라 점수와 선택 확률을 계산한다.
- 선택 확률에 따라 부모 노드를 선택한다.
- 선택된 두 부모 노드가 교차해 자식 노드가 생성된다.
- 다양성을 위해 적은 수의 돌연변이가 생성된다.

Game Playing
Game
- Unpredictable하다 → Contingency plan으로 solution을 도출한다.
- 시간 제한이 있다 → 정답을 도출하기 보단 근사치를 추정한다.
- 게임의 유형은 deterministic한가, 정보가 완전한가 여부로 나뉜다.
Minimax
- deterministic & perfect-information 게임에 사용가능한 전략이다.
- 상대는 MIN 값을 선택하고, 나는 MAX값을 선택한다.
- 우측 예시에서 왼쪽 서브트리를 살펴보자.
- 나는 MAX인 20(2)을 선택한다.
- 상대는 MIN인 20(4)을 선택한다.
- 나는 MAX인 20(9)을 선택한다.
- 성능 측정
- Complete: Yes
- Optimal: Yes
- Time Complexity: O(b^m). (분기 b의 노드를 매번 검색하기 때문)
- Space Complexity: O(bm). (깊이 우선 탐색이기 때문)


Alpha-beta prunning
- Minimax에서 가능성이 없는 노드를 배제(가지치기)한다.
- 우측 예시에서 왼쪽 서브트리를 살펴보자.
- 최하단에서 상대방은 MIN을 선택한다.
- 왼쪽 서브트리에서 MAX로 20이 나왔다.
- 그럼 오른쪽 서브트리에서 MAX가 20 이하의 값이 나와야 상대방은 MIN으로 선택한다.
- 허나 20 이상인 30이 나왔다. 즉, 오른쪽 서브트리의 MAX는 적어도 30이다.
- 오른쪽 서브트리는 더이상 가능성이 없으므로 11 노드를 고려하지 않는다.
- 성능 측정
- 시간 복잡도: O(^(m/2))

Minimax 심화
- Minimax에서 빠른 시간 내에 답을 하기 위해 깊이를 제한한다.
- cutoff test와 evaluation function을 사용한다.
- evaluation function
- features에 대한 개별 기여도를 계산해 총합을 반환한다. Q:9, L: 5, B,K: 3, P: 1
- EVAL(Black) = 91 + 52 + 33 + 18
- EVAL(White) = 91 + 52 + 33 + 18
- EVAL(Black) = 91 + 52 + 33 + 18
- EVAL(White) = 91 + 52 + 32 + 16
- features에 대한 개별 기여도를 계산해 총합을 반환한다. Q:9, L: 5, B,K: 3, P: 1
- Cutting Off
- 종료 판단이 Cutoff, 가치 및 우선순위 판단이 EVAL
- Quiescence search이다.
- 미래를 먼저 예측하는 것이다.
- evaluation function


Nondeterministic game
- 체스와 달리 확률이 포함된 게임
- MIN노드, MAX노드, CHANCE노드로 구성된다.
- CHANCE노드에서 확률게임을 한다.
if state is a chance node then return average of EXPECTIMINIMAX-VALUE of SUCCESSORS(state)CSP
CSP
- 제약조건을 정의해 이를 해결하는 문제이다.
- 그래프를 만들 수 있는 문제에 적합하다.
- 성능 측정
- 공간 복잡도: n
- 탐색 깊이: n
- 시간 복잡도: O(|D|^2)
- 검색 알고리즘: DFS
- 분기 계수(branching factor):
$\Sigma i|Di|\ (at\ top\ of\ tree)$
- 다음의 두 조건으로 극적으로 향상된다
- 할당 순서는 무관하다. 모든 경로는 비용이 같다.
- 성능을 헤치는 constraint는 연결하지 않는다.

- CSP는 여러 종류가 있다.
- Boolean
- Binary
- Unary
- Binary
- Ternary
- Binary와 Boolean은 시간이 걸리지만 풀 수 있다.
- 다만, Non-binary와 Non-boolean은 풀 수 없다.
Wumpus World

8 퀸즈 문제 해결
- DFS - 가장 무식한 방식
- 백트래킹 - DFS보다 빨라졌지만 아직 느리다
- 포워드 체킹 - 미리 갈 수 없는 지역은 지우고 백트래킹 방식을 사용한다.
Arc Consistency
- 못 푸는 문제가 존재한다.
- Map Coloring with Two Colors가 그러하다 - 세 개의 지역을 두 개의 색으로 칠해야한다. 인접한 세 지역은 서로 색이 달라야한다.
Propositional
- Syntax: NOT ㄱ, AND ^, OR V, IMPLIES ⇒, IF AND ONLY IF(iff, 꼭!) <=>
- 활용: P ⇒ Q 이것은 NOT P OR Q와 같다. → 진리표를 활용해서 증명 가능.NOT(P AND Q) OR R
- NOT P OR NOT Q OR R
- (P AND Q) ⇒ R
(A OR B) AND (C OR D) —> Conjunctive Normal Form
P IFF Q = (P ⇒ Q) AND (Q ⇒ P)
Logic
Modus Pones
AND = conjunctive, or = disjunctive
Functions 와 Predicate 구별하기
- Predicate는 참, 거짓으로 구별이 된다.
- eg. Odd(3) = 참
- Functions는 답을 도출한다.
- add(2, 7) = 9
Term의 종류
- Constants
- Variables
- Functions